IARC Mission 10 Concept Review: Laying the groundwork for the mission!
Welcome back to another blog post! This week was all about our Concept Review, a key milestone in our journey for IARC Mission 10. The Concept Review is an event where our team presents and discusses ideas with our partners, alumni, coaches, and NTNU professors to gain valuable feedback. This helps us refine our plans, learn from past challenges, and align our goals as we head towards building the Minimum Viable Product (MVP) before May.
We know that we don’t have all the answers and often, we don’t even know the questions. That’s why the experience and support of our partners and mentors are so crucial. Their feedback is not only helpful in refining our ideas but also inspiring as we aim to solve this year’s complex mission.
IARC Mission 10
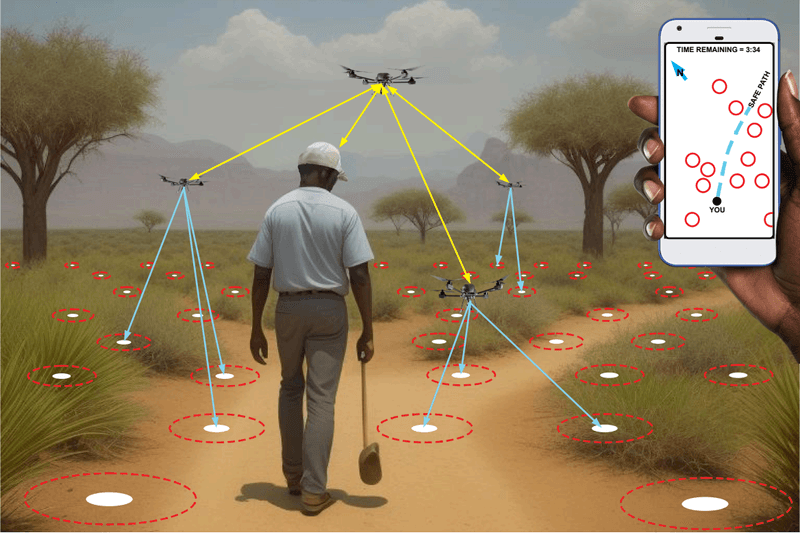
Mission 10 of IARC presents an exciting challenge: guiding a person safely across a 100-meter minefield in under 10 minutes. The minefield is filled with both contact and influence-triggered mines, requiring careful navigation to ensure safety.
To achieve this, the "person-at-risk" is assisted by four lightweight drones, each weighing less than one pound. These drones, controlled through gestures or voice commands, work together to scout the terrain, marking a safe path while maintaining a one meter clearance from any potential mines. A digital map is created and viewable on a phone, enhancing situational awareness. The mission emphasizes coordination, mapping, and communication between the drones and the user rather than advanced mine detection.
Each drone is equipped with infrared (IR) sensors to detect mines by identifying IR emissions, while obstacle avoidance - essential for this mission - is managed through either stereo cameras or LiDAR to navigate around drones, obstacles and the user. The goal is challenging: cross the minefield safely and efficiently within 10 minutes, relying on seamless teamwork between the drones and the user. .
Want to learn more about our Mission 10 efforts? Check out more details [HERE]. For the official mission rules, visit [HERE].
Concepts Presented and Feedback
We kicked off with presentations from our four technical groups: Autonomy, Perception, Control and Hardware.


Autonomy presented their approach to mission planning and pathfinding, including debates about different path-planning techniques. It’s all about finding the most efficient and safest way to navigate the minefield. The team received some great insights into the pros and cons of methods like heuristic search and potential fields. They are refining their approach based on the valuable feedback they got.
Perception focused on developing effective solutions for detecting obstacles and accurately localizing mines. A significant part of the discussion involved selecting the right onboard computer - an essential choice for managing processing needs while keeping the system lightweight. Choosing optimal sensors and mapping technology is also crucial to reliably map the minefield and guide navigation. Additionally, Perception is working on a mobile app that will display the safe path for the person to follow. This app aims to provide real-time visualization of the marked route, enhancing situational awareness and helping ensure the path remains clear and safe.
Control focused on collision avoidance and precise GNSS positioning. They are working to ensure drones can dynamically avoid obstacles while keeping the person safe. GNSS positioning has been a key topic, especially since we need centimeter-level accuracy. Our sponsors’ input was crucial here in evaluating different correction methods, like using RTK base stations or new GNSS correction services.
Hardware’s goal is to ensure that our four drones, each under one pound, can achieve efficient flight, real-time processing, and coordination while staying within weight limits. They’re exploring lightweight, high-strength materials to reduce overall weight, freeing up capacity for additional batteries and sensors to meet mission demands. Each drone will need efficient lift and power systems to support essential sensors and computing for real-time mapping and navigation. Tackling challenges like heat buildup and secure mounting in a compact frame, the team is also considering custom enclosures and strategic component placements. Extensive calculations have helped estimate the battery power each drone will require.
A Backpack Full of Tech
One interesting constraint this year is that all our technology must fit within a backpack. This compact hub is crucial for keeping the person in the minefield connected to the drones, handling communication, navigation, and control - all from one portable system. It’s an ambitious challenge, but one that’s pushing us to innovate and be efficient with our tech.

The Value of Feedback
After two intense presentations from Autonomy and Perception, we took a well-earned pizza break to chat and share ideas. It was a great opportunity to reflect on our concepts and gather informal feedback before Control and later on the Hardware team presented. The feedback from our partners, coaches, and professors is invaluable and plays a significant role in helping us achieve our goal for Mission 10.
We want to extend our deepest gratitude to all those who made our Concept Review possible.
A special thank you to NTNU’s Faculty of Information Technology and Electrical Engineering for their ongoing support, as well as to our sponsors, both those who joined us in person and those who connected over the internet. Your feedback is invaluable.
Lastly, a heartfelt thank you to all the alumni who took the time to participate. Your experience and insights are crucial to helping us grow and succeed.
Stay tuned for more updates as we move towards realizing our vision for this year’s mission!
